Руководство по летной эксплуатации
Летно-технические характеристики и аэродинамические особенности вертолета
Потребная мощность для горизонтального полета
Потребная мощность для полета вертолета Ми-2 при постоянных оборотах несущего винта определяется крутящим моментом на валу, необходимым для преодоления момента сопротивления вращению несущего винта. Момент сопротивления вращению несущего винта изменяется в зависимости от режима полета и полетной массы вертолета.
Потребная мощность и момент сопротивления вращению несущего винта имеют наибольшие значения при максимальной (3550 кг) массе вертолета на режиме висения вне зоны влияния «воздушной подушки» и на максимальной скорости горизонтального полета.
Величина потребной мощности на режиме висения определяется в основном индуктивным сопротивлением несущего винта, а на максимальной скорости — вредным сопротивлением вертолета. Влияние индуктивного сопротивления несущего винта и вредного сопротивления вертолета приводит к тому, что на участке малых скоростей (до 100 км/ч) потребная мощность для выполнения горизонтального полета с ростом скорости уменьшается из-за более интенсивного падения индуктивного сопротивления несущего винта по сравнению с одновременным увеличением вредного сопротивления вертолета.
С увеличением скорости более 100 км/ч по прибору потребная мощность возрастает за счет более интенсивного роста вредного сопротивления вертолета по сравнению со снижением индуктивного сопротивления несущего винта.
Ограничения по скорости полета
На вертолете Ми-2 максимальная скорость полета ограничена на всех высотах.
Для высот 1500 м и ниже установлена максимальная скорость 180 км/ч по прибору при температурах наружного воздуха +25°С и выше. Это ограничение вызвано тем, что на скоростях, превышающих 180 км/ч, при температурах наружного воздуха +25°С и выше резко возрастают переменные нагрузки в системе управления на участках от гидроусилителей до несущего винта. При температурах наружного воздуха ниже + 25°С максимальная скорость полета по прибору на высотах 500 м и ниже установлена 210 км/ч и на высоте 1000 м — 200 км/ч.
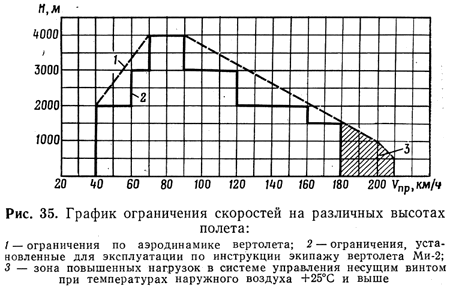
Ограничение максимальной скорости на высотах от 1000 до 4000 м (рис. 35) связано с тем, что с увеличением высоты полета возрастает потребный общий шаг несущего винта, в результате чего при маховых движениях лопастей срыв потока на конце лопасти, идущей по потоку, наступает на меньших скоростях полета.
Максимальная скорость полета вертолета Ми-2 с высоты 1000 до высоты 4000 м уменьшается с 200 до 90 км/ч по прибору.
На вертолете Ми-2 минимальная скорость ограничена на всех высотах (рис. 35). Ограничение минимальной скорости (не менее 40 км/ч) на высотах 2000 м и ниже связано с неустойчивой работой указателя скорости УС-250 на скоростях ниже 40 км/ч.
Увеличение минимальной скорости на высотах от 2000 до 4000 м вызвано падением мощности двигателей с высотой ниже потребной для выполнения горизонтального полета на скоростях, которые меньше минимальных.
Минимальная скорость полета вертолета Ми-2 с высоты 2000 до 4000 м увеличивается с 40 до 70 км/ч по прибору.
Характеристики скороподъемности
Максимальная скороподъемность вертолета обеспечивается при наивыгоднейшей скорости набора высоты, т. е. на такой скорости по траектории, которая соответствует максимальному избытку мощности на данной высоте при установившемся режиме работы двигателей. Наивыгоднейшая скорость набора высоты для вертолета Ми-2 от земли до высоты 1000 м составляет 100 км/ч по прибору.
С увеличением высоты наивыгоднейшая скорость набора уменьшается.
Характеристики скороподъемности вертолета с взлетной массой 3550 кг в стандартных атмосферных условиях при работе двигателей на номинальном режиме приведены в табл. 23.
Таблица 23
| Высота, м | Вертикальная, скорость набора, м/с | Время набора, мин — с | Наивыгоднейшая скорость набора по прибору, км/ч |
|---|---|---|---|
| У земли | 3,2 | 0 | 100 |
| 1000 | 3,1 | 5,5 | 100 |
| 1500 | 3,1 | 8 | 95 |
| 2000 | 3 | 10,5 | 95 |
| 2500 | 2,8 | 13 | 90 |
| 3000 | 2,5 | 16,5 | 90 |
| 3500 | 1,8 | 20,5 | 85 |
| 4000 | 0,7 | 26,5 | 80 |
Аэродинамические поправки
Аэродинамические поправки приемника воздушных давлений изменяются в зависимости от скорости полета и достигают для указателя скорости +5 — +6 км/ч на Vnp = 60 км/ч и — 8 км/ч на Vnp = l80 км/ч.
Тяга несущего винта
Свободная тяга, развиваемая несущим винтом вертолета на взлетном режиме работы двигателей (800 л.с.), в стандартных атмосферных условиях на уровне моря при штиле составляет 3580 кгс.
Зависимость тяги несущего винта на взлетном режиме работы двигателей от высоты висения вертолета над поверхностью площадки, расположенной на уровне моря, приведена на графике рис. 36.
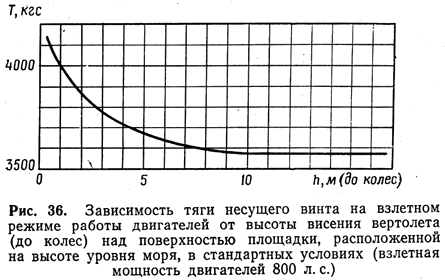
График на рис. 36 показывает, что при взлетной массе 3550 кг вертолет при использовании взлетной мощности двигателей (800 л. с.) висит вне зоны влияния «воздушной подушки».
Максимальная тяга, развиваемая несущим винтом при висении вертолета на высоте 3 м над поверхностью площадки, составляет 3770 кгс.
Тяга несущего винта сильно изменяется от изменений атмосферных условий и зависит от температуры наружного воздуха, скорости встречного ветра и барометрического давления на высоте площадки.
Зависимость тяги от указанных параметров использована при отработке номограмм для определения предельных полетных масс вертолета, которые приведены на рис. 17 и 18.
Кроме того, тяга несущего винта зависит от фактической мощности двигателей, которая в процессе эксплуатации (выработки ресурса) изменяется и может отличаться от суммарной мощности (800 л. с.), для которой рассчитаны номограммы.
Поэтому для проверки соответствий фактической тяги несущего винта предельной массе вертолета, определенной по номограмме рис. 18, в каждом конкретном случае необходимо перед взлетом производить контрольное висение, высота которого над поверхностью должна составлять
Высота контрольного висения с предельной массой, определенной по номограмме рис. 17, во всех случаях должна составлять не менее 10 м.
Взлетно-посадочные характеристики
Взлетные характеристики зависят от взлетной массы вертолета, высоты расположения площадки над уровнем моря, температуры наружного воздуха, способа взлета и от скорости и направления ветра.
С увеличением массы вертолета повышается потребная мощность и возрастает потребная тяга несущего винта, в результате чего при постоянной располагаемой мощности двигателей взлетные характеристики вертолета ухудшаются.
С уменьшением высоты расположения площадки и с понижением температуры наружного воздуха располагаемая мощность двигателей увеличивается. Встречный ветер при неизменной мощности двигателей дополнительно повышает располагаемую тягу несущего винта.
Повышение мощности двигателей и увеличение располагаемой тяги несущего винта улучшают взлетные характеристики вертолета.
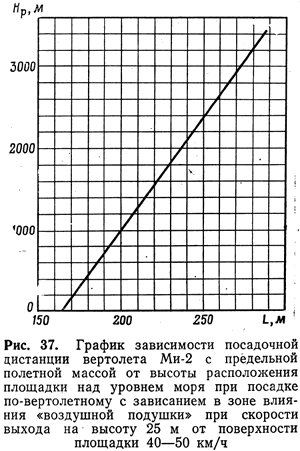
Для определения взлетной дистанции вертолета с учетом высоты расположения площадки над уровнем моря, температуры наружного воздуха и взлетной массы вертолета в Инструкции помещен график зависимости взлетной дистанции от предельной высоты висения вертолета над поверхностью площадки на взлетном режиме работы двигателей (рис.19).
График показывает, что увеличение предельной высоты висения на взлетном режиме работы двигателей с 3,5 до 10 м сокращает взлетную дистанцию вертолета с 200 примерно до 140 м.
В зависимости от размеров площадки и наличия препятствий на подходах к ней взлет по-вертолетному может производиться двумя способами — вертикальный взлет с выходом из зоны влияния «воздушной подушки» и с разгоном в зоне влияния «воздушной подушки».
Определение предельных масс вертолета для взлетов указанными способами производится по соответствующим номограммам (рис. 17 и 18).
Методика определения предельной массы вертолета по этим номограммам состоит в следующем.
На вертикальной оси Н находится точка, соответствующая высоте расположения площадки над уровнем моря (например, 1800 м). От этой точки вправо проводится горизонтальная линия до пересечения с наклонной прямой, которая соответствует фактической температуре воздуха на взлетной площадке (например +10°С). Из полученной точки пересечения проводится вертикальная прямая вниз до встречи с нижней частью номограммы (с горизонтальной прямой, соответствующей W=0). Из точки встречи вертикальной прямой с прямой W=0 проводится кривая, эквидистантная ближайшим кривым, нанесенным на нижней части номограммы до пересечения с горизонтальной прямой, которая соответствует скорости встречного ветра на взлетной площадке (например, W=4 м/с). Из точки пересечения кривой с горизонтальной прямой линией проводится вертикальная прямая вниз до пересечения с горизонтальной осью, на которой отсчитывается значение предельной полетной массы вертолета.
В рассмотренном случае предельные массы вертолета равны:
- 3320 кг для взлета вне зоны влияния «воздушной подушки» (номограмма рис. 17);
- 3550 кг для взлета в зоне влияния «воздушной подушки» (номограмма рис. 18).
Из этих номограмм видно, что в одних и тех же условиях предельная масса вертолета при взлете с разгоном в зоне влияния «воздушной подушки» значительно превосходит предельную массу при взлете с разгоном вне зоны влияния «воздушной подушки».
При взлете с предельной массой, определенной по номограмме рис. 18, высота зависания вертолета над поверхностью площадки должна составлять
«Проседание» вертолета на начальном участке разгона обусловлено, с одной стороны, наклоном тяги несущего винта, необходимым для разгона, и уменьшением эффекта влияния близости земли на прирост тяги несущего винта при появлении воздушной горизонтальной скорости (происходит «сдувание» «воздушной подушки»). С другой стороны, горизонтальная воздушная скорость приводит к увеличению располагаемой тяги несущего винта или к уменьшению потребной мощности. В результате влияния указанных факторов в начале разгона с режима висения потребная мощность сначала несколько увеличивается, а затем, достигнув максимума, падает.
Так как в рассматриваемом случае взлета располагаемая мощность двигателей используется полностью, то данный характер изменения потребной мощности вызывает кратковременное «проседание» вертолета в начале разгона. С увеличением высоты расположения площадки над уровнем моря величина «проседания» вертолета в начале разгона возрастает.
Для обеспечения разгона в зоне влияния «воздушной подушки» без касания колесами шасси земли при взлете с площадок, расположенных на высотах более 2000 м, предельную массу вертолета, определенную по номограмме рис. 18, необходимо уменьшать на 50 кг. Высота висения вертолета на взлетном режиме работы двигателей при этом будет составлять не менее 3 м над поверхностью площадки.
Для выполнения взлетов и посадок по-вертолетному вне зоны влияния «воздушной подушки» на площадках, расположенных на высотах более 3000 м, запас управления по правой педали на вертолете Ми-2 недостаточен.
Для обеспечения запаса управления по правой педали не менее 15% необходимо предельную массу вертолета, определенную по номограмме рис. 17 для площадок, расположенных на высотах более 3000 м, также уменьшать на 50 кг.
При взлете по-вертолетному на величину взлетной дистанции оказывает влияние величина скорости, достигнутой над препятствием. Для вертолета Ми-2 увеличение скорости выхода на высоту 25 м на 10 км/ч приводит к увеличению взлетной дистанции на
Взлетная дистанция вертолета Ми-2 практически не изменяется, если взлет производится с высоты висения ниже предельной, при условии использования в процессе взлета полного избытка располагаемой мощности, переводе двигателей на взлетный режим.
Взлет вертолета с разбегом «по-самолетному производится в тех случаях, когда его полетная масса превышает предельную, определенную по номограмме рис. 18. Перед выполнением такого взлета производится контрольное висение: вертолет на взлетном режиме работы двигателей должен висеть на высоте не менее 0,5 м. Взлет с разбегом по-самолетному обеспечивается на площадках, которые в направлении взлета на протяжении
С таких площадок независимо от высоты их расположения над уровнем моря (от 0 до 1500 м), температуры наружного воздуха (от +30°С и ниже) и скорости встречного ветра (от 0 до 15 м/с) взлет с разбегом обеспечивается при максимальной взлетной массе вертолета 3550 кг.
Взлетная дистанция при этом будет
Посадочная дистанция при посадке по-вертолетному с зависанием в зоне влияния «воздушной подушки» зависит от высоты расположения площадки над уровнем моря, и на каждую 1000 м увеличения высоты площадки посадочная дистанция возрастает на
График рис. 37 дает зависимость посадочной дистанции от высоты расположения площадки над уровнем моря для предельной массы вертолета.
Предельная масса вертолета для посадки зависит от высоты расположения посадочной площадки, температуры воздуха на месте посадки и скорости встречного ветра на курсе посадки.
Для обеспечения длины посадочной дистанции, не превышающей длину дистанции, определенной по графику рис. 37, необходимо произвести следующее:
- из условий высоты расположения площадки, на которой предполагается посадка, и температуры воздуха у ее поверхности определить предельную полетную массу вертолета по номограмме рис. 18;
- загрузить вертолет так, чтобы его полетная масса с учетом выработки топлива к моменту выхода на посадочную площадку не превосходила предельной, предварительно определенной по номограмме рис. 18.
Примечание. Взлетная масса вертолета во всех случаях не должна быть больше 3550 кг, а на высокогорных площадках при взлетах по-вертолетному — больше предельной массы, определяемой по номограммам рис. 17 или 18.
Зависимость взлетных оборотов двигателя ГТД-350 от температуры наружного воздуха и высоты расположения площадки над уровнем моря
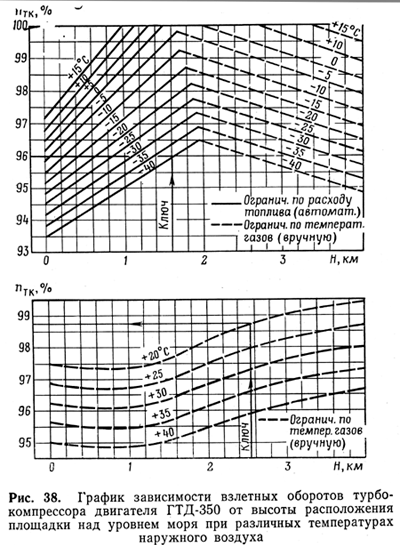
Взлетные обороты двигателя изменяются в зависимости от температуры наружного воздуха и высоты расположения площадки над уровнем моря. Характер зависимости оборотов от указанных параметров представлен на графике рис. 38.
Верхняя часть графика показывает, что при температуре наружного воздуха —40°С взлетные обороты двигателя от высоты уровня моря до высоты примерно 1900 м возрастают с 93,5 до 96,5%. На высоте 1900 м наступает ограничение по температуре газов, вследствие чего при дальнейшем увеличении высоты с 1900 до 4000 м летчик должен вручную уменьшать обороты двигателя с 96,5 до 94,8%, не допуская увеличения температуры газов более 970 (985) °С.
При температуре наружного воздуха +15°С взлетные обороты двигателя от высоты уровня моря до высоты примерно 1000 м возрастают с 97,2 до 100%. На высотах от 1000 до 3350 м взлетные обороты автоматически поддерживаются равными 101%. На высоте 3350м наступает ограничение по температуре газов, вследствие чего при дальнейшем увеличении высоты до 4000 м летчик должен вручную уменьшить обороты двигателя со 100 до 99,5%, не допуская возрастания температуры газов более 970 (985) °С.
При температурах наружного воздуха +20°С и выше двигатель ГТД-360 выходит на ограничение по температуре газов на всех высотах от 0 до 4000 м (нижний график рис. 38).
Графиками рис. 38 можно пользоваться для проверки взлетных оборотов двигателей при опробовании их на вертолетах Ми-2, базирующихся на высокогорных площадках. Взлетные обороты двигателя при его опробовании должны быть не ниже оборотов, определяемых по графику для заданной высоты площадки и заданной температуры наружного воздуха у поверхности площадки.
В случае если обороты двигателя на взлетном режиме окажутся ниже оборотов, определенных по графикам рис. 38, а их регулировке в сторону увеличения препятствует ограничение по температуре газов, вопрос о дальнейшей эксплуатации двигателя решается с представителем промышленности.
Особенности управления
Управление вертолетом одновинтовой схемы осуществляется несущим и рулевым винтами.
Несущий винт вертолета служит органом продольного и, поперечного управления, а рулевой винт — для уравновешивания реактивного момента от несущего винта и органом путевого управления.
В целях улучшения условий пилотирования вертолета нейтральному положению ручки управления соответствует отклонение кольца автомата перекоса вперед на 50′.
Благодаря такой связи ручки с кольцом автомата перекоса на наиболее распространенных режимах полета ручка управления располагается ближе к летчику, что особенно важно при задних центровках вертолета.
Чтобы на наиболее распространенных режимах полета положение педалей было близким к нейтральному, связь между отклонением педалей и, изменением углов установки лопастей рулевого винта выполнена так, что нейтральному положению педалей соответствует положительный угол установки лопастей рулевого винта 5°, который обеспечивает путевую балансировку вертолета на режимах, близких к крейсерскому.
В связи с тем, что управление автоматом перекоса осуществляется через необратимые гидроусилители, в системе продольного и поперечного управления установлены пружинные загрузочные механизмы, обеспечивающие создание и снятие нагрузок с ручки управления вертолетом. Управление загрузочными механизмами электрическое и производится от кнопки, установленной на ручке управления, или от переключателей, установленных на левой панели.
По уравнению с самолетом управление вертолетом имеет ряд особенностей, которые вызваны тем, что изменение угла тангажа и крена после соответствующего отклонения ручки управления на вертолете происходит с заметным запаздыванием (на самолете это запаздывание практически не ощущается). Если на самолете ручка управления непосредственно связана с рулем или элеронами, отклонение которых сразу же изменяет момент, то на вертолете после отклонения ручки, управления изменение момента произойдет не сразу, а лишь после изменения положения лопастей в результате маховых движений. Рулевые поверхности на самолете создают момент относительно центра тяжести самолета на большем плече, чем на вертолете, поэтому для создания такого же момента на вертолете необходимо изменить направление движения большего потока воздуха. На самолете эффективность управления зависит от скорости полета, на вертолете же эта зависимость незначительна. На вертолете наблюдается взаимное влияние продольного управления на поперечное и наоборот.
Для создания крена влево летчик должен отклонять ручку влево и немного на себя, а для создания крена вправо — вправо и немного от себя.
Путевое управление вертолетом осуществляется педалями за счет изменения угла установки лопастей рулевого винта.
Изменение момента от рулевого винта происходит практически одновременно с отклонением педалей (изменением угла установки лопастей), вследствие чего путевое управление по сравнению с поперечным и продольным не имеет такого большого запаздывания.
Балансировка вертолета
Установившийся полет всякого летательного аппарата возможен при условии полной его балансировки, т. е. при равенстве нулю суммы всех сил и суммы всех моментов, действующих на летательный аппарат. В отличие от самолета балансировка вертолета имеет принципиальные особенности, определяемые в основном условиями работы и свойствами несущего винта, а также аэродинамической асимметрией вертолета одновинтовой схемы.
Характерные особенности балансировки:
- У самолета угол тангажа в значительной степени зависит от угла наклона траектории полета. У вертолета же угол тангажа изменяется при изменении угла наклона траектории столь незначительно, что при одной и той же скорости полета в наборе высоты, в горизонтальном полете и на планировании практически остается неизменным.
- В отличие от самолета у вертолета с изменением скорости горизонтального полета положение ручки управления в поперечном отношении существенно изменяется. Вместе с этим от скорости прямолинейного полета зависит также и балансировочное положение педалей ножного управления.
Уяснить особенности балансировки вертолета можно, рассмотрев схему сил и моментов, действующих на вертолет в полете с поступательной скоростью (рис. 39).
Силы и моменты, действующие в установившемся горизонтальном полете в плоскости симметрии вертолета (продольная балансировка)
Силы:
- G — сила тяжести;
- Т — сила тяги или составляющая полной аэродинамической силы несущего винта, направленная по оси втулки винта;
- Н — составляющая силы R, действующая в плоскости вращения втулки несущего винта (продольная сила);
- Хвр — сила вредного лобового сопротивления (сила сопротивления фюзеляжа и других ненесущих частей конструкции, шасси, стабилизатора);
- Нр.в, Sр.в — продольная и боковая силы рулевого винта (эти силы практически очень малы и при анализе равновесия их обычно не учитывают) ;
- Yст — подъемная сила стабилизатора.
Моменты:
- Мреакт — реактивный момент рулевого винта;
- Мпрод — продольный момент несущего винта, имеющего разнос горизонтальных шарниров лопастей.
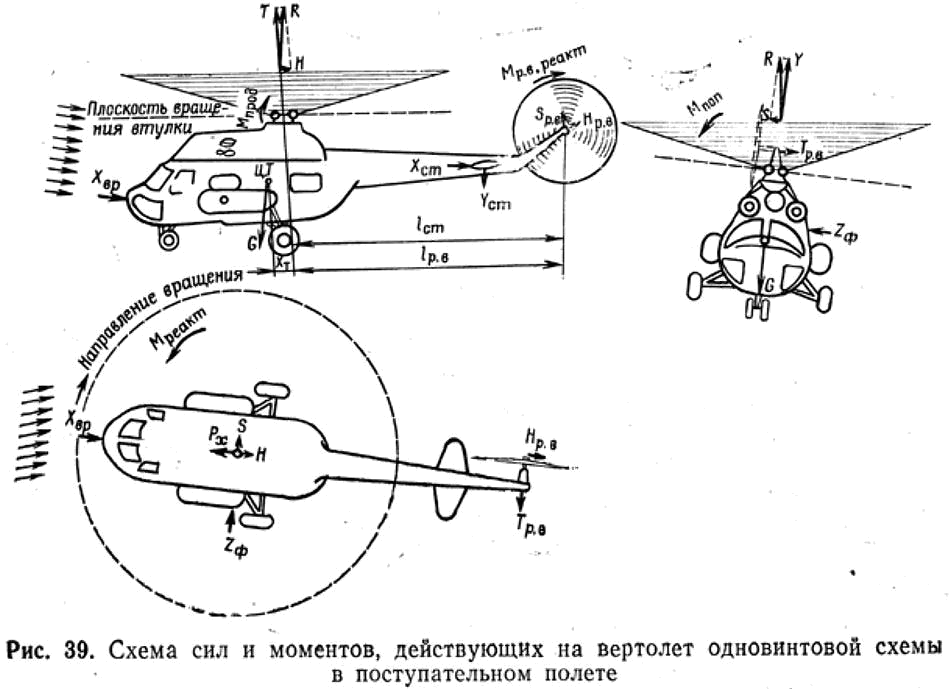
Силы и моменты, действующие в поперечной плоскости (поперечная балансировка)
Силы:
- G — сила тяжести;
- Y — вертикальная составляющая силы R (проекция силы на вертикальную плоскость);
- S — боковая сила несущего винта (составляющая силы R, возникающая вследствие наклона конуса вращения лопастей вбок);
- Тр.в — тяга рулевого винта;
- Zф — боковая составляющая силы сопротивления фюзеляжа (например, при полете вертолета со скольжением).
Момент Мпоп — поперечный момент несущего винта, возникающий вследствие разноса горизонтальных шарниров.
Силы и моменты, действующие в горизонтальной плоскости (путевая балансировка)
- Rx — горизонтальная составляющая силы тяги;
- Хвр — сила вредного сопротивления;
- S — боковая составляющая силы тяги несущего винта;
- Тр.в — тяга рулевого винта;
- Zф — боковая составляющая силы сопротивления фюзеляжа;
- Нр.в — продольная сила рулевого винта.
Моменты:
- Мреакт — реактивный момент несущего винта;
- Мр.в = Тр.вlр.в— момент тяги рулевого винта.
Показанные на рис. 39 силы, кроме силы тяжести G, дают относительно центра тяжести вертолета моменты, которые также надо учитывать при рассмотрении его балансировки.
Продольная балансировка вертолета
Сила для поступательного перемещения создается вследствие наклона всего вертолета в сторону движения.
При наклоне вертолета такой силой является Рх (проекция вектора тяги Т несущего (винта на направление движения вертолета).
При планировании на режиме самовращения несущего винта силой, заставляющей вертолет перемещаться по наклонной траектории, является проекция вектора силы тяжести на траекторию планирования. Чем больше опущен нос вертолета, тем больше скорость планирования.
Следовательно, в моторном полете (в наборе высоты или в горизонтальном полете) и при планировании на режиме самовращения несущего (винта для увеличения скорости полета вертолета необходимо увеличить угол тангажа на пикирование.
Продольное балансировочное положение ручки управления вертолетом в установившемся режиме полета определяется характеристиками продольной статической устойчивости несущего винта, моментными характеристиками фюзеляжа и стабилизатора и в большой степени зависит от центровки вертолета и числа оборотов несущего винта.
Известно, что несущий винт неустойчив по углу атаки и устойчив по скорости, т. е. случайный прирост угла атаки создает условия для еще большего увеличения этого угла, а непреднамеренное внезапное увеличение скорости полета приводит к возникновению на несущем винте дополнительной силы, тормозящей движение вертолета вследствие увеличения завала конуса винта назад.
На устойчивость несущего винта влияют жесткостные характеристики лопастей, от которых зависят величины крутильных и изгибных деформаций, и истинный наклон конуса вращения винта в его периферийной, наиболее эффективной части.
Для увеличения статической устойчивости несущего винта его лопасти имеют специальный аэродинамический профиль с загнутой вверх задней кромкой. Благодаря этому с ростом скорости полета лопасть получает дополнительно положительную закрутку в левой и изгиб вверх в передней части диска винта, а ручка управления — дополнительное потребное для балансировки вертолета отклонение вперед.
Фюзеляж вертолета создает аэродинамический момент, ухудшающий статическую устойчивость по скорости.
Стабилизатор на хвостовой балке способствует повышению продольной статической устойчивости вертолета, т. е. при увеличении скорости полета он создает такой аэродинамический момент, для уравновешивания которого требуется отклонение ручки управления вперед.
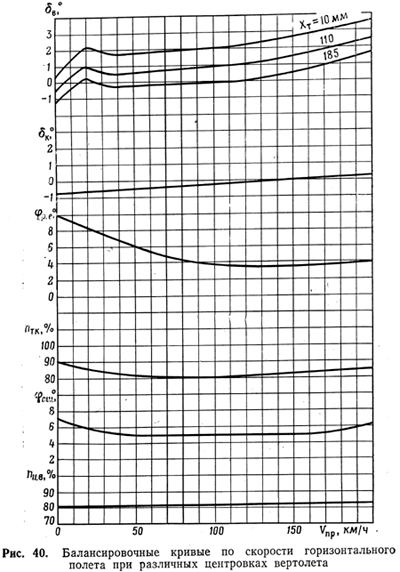
На рис. 40 приведены балансировочные положения автомата перекоса, отклонения лопастей рулевого винта, положения рычага общего шага, обороты турбокомпрессоров двигателей и обороты несущего винта в зависимости от скорости полета при различных центровках.
Как видно из рис. 40, чем больше задняя центровка вертолета, тем больше наклон автомата перекоса вперед, т. е. тем больше переднее положение занимает ручка управления, и наоборот, при смещении «центровки вперед ручка отклоняется все более назад.
Предельно задняя эксплуатационная центровка вертолета определяется необходимым запасом хода ручки на режиме максимальной скорости полета, а предельно передняя — величиной этого запаса на висении с попутным ветром.
На вертолете Ми-2 минимальный запас продольного управления в направлении от себя при предельно задней центровке на скорости 180 км/ч составляет 20% от полного диапазона хода ручки. Минимальный запас продольного управления в направлении на себя при предельно передней центровке на висении при ветре 5 м/с спереди составляет 26%, а при ветре 5 м/с сзади— 10% полного диапазона хода ручки.
Из рис. 40 видно, что для увеличения скорости полета при переходе от висения к скорости 20 км/ч ручку необходимо отдавать от себя, затем для дальнейшего разгона до скорости 50 км/ч нужно брать несколько на себя, далее вертолет разгоняется до скорости 80 км/ч практически при неизменном положении ручки управления. Для дальнейшего увеличения скорости полета ручку необходимо отдавать от себя тем больше, чем больше скорость полета.
При планировании на режиме самовращения несущего винта для увеличения скорости полета ручку управления необходимо отдавать от себя.
Характеристики продольной устойчивости и управляемости при полете с подвесными баками практически не отличаются от характеристик без подвесных баков.
Поперечная и путевая балансировка вертолета
Поперечная балансировка вертолета
Поперечная балансировка вертолета достигается при условии, если будут уравновешены боковая сила S несущего винта, тяга рулевого винта Тр.в, боковая сила фюзеляжа Zф, а также моменты от этих сил относительно центра тяжести вертолета и поперечный момент Мпоп несущего винта.
Изменение поперечной балансировки с ростом скорости полета оценивается по балансировочным отклонениям ручки управления (автомата перекоса) в поперечном направлении. На рис.40 и 41 приведены балансировочные положения автомата перекоса в поперечном направлении в зависимости от скорости полета при различных режимах полета и центровках. Поперечная балансировка вертолета практически не зависит от его центровки.
На висении автомат перекоса несущего винта необходимо отклонять вправо примерно на
С переходом от режима висения к поступательному полету вплоть до максимальных скоростей полета ручку управления для обеспечения поперечной балансировки вертолета необходимо отклонять влево.
В наборе высоты потребные отклонения ручки управления влево с ростом скорости полета практически такие же, как и в режиме горизонтального полета.
Максимальное отклонение ручки управления влево на вертолете Ми-2 требуется при планировании на большой скорости на режиме самовращения несущего винта.
Для обеспечения равенства поперечных моментов от боковой силы несущего винта и тяги рулевого винта в полете требуется создание крена или скольжения.
При полете с креном сила тяги рулевого винта уравновешивается суммой боковой силы несущего винта и проекцией силы тяжести в сторону крена, при полете со скольжением — суммой боковой силы несущего винта и боковой составляющей силы сопротивления фюзеляжа.
На режимах моторного полета для обеспечения поперечной балансировки вертолета необходим небольшой крен до 2,5° вправо или скольжение влево до
При планировании на режиме самовращения несущего винта необходимы крен до 1° влево или скольжение вправо до 3°.
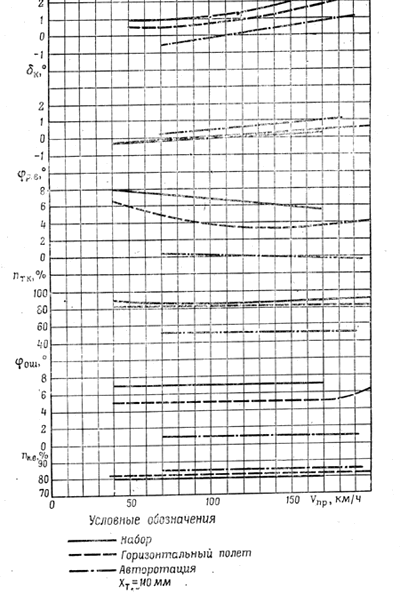
Рис. 41. Балансировочные кривые по скорости полета и изменение балансировки вертолета при изменении режима работы двигателей
На режиме висения уравновешивание сил в поперечном направлении может быть обеспечено лишь накренением вертолета вправо до
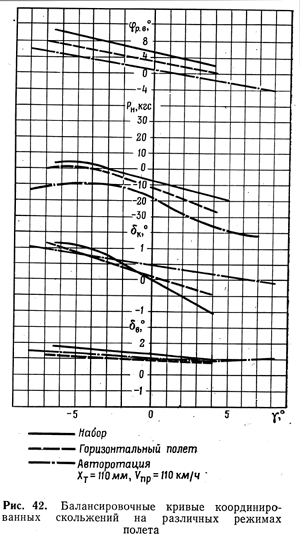
Вертолет Ми-2 обладает поперечной устойчивостью по углу скольжения (углу крена при координированных скольжениях). Наклон балансировочных кривых поперечных отклонений автомата перекоса по углу крена уменьшается с увеличением скорости полета и увеличивается на одной и той же скорости при переходе к режиму работы двигателей с большей мощностью (переход от планирования на самовращении несущего винта к набору высоты на номинальном режиме работы двигателей и т. п., рис. 42).
Путевая балансировка вертолета
Путевая балансировка вертолета Ми-2 достигается при равенстве реактивного момента несущего винта и момента тяги рулевого винта, т. е. когда Мреакт = Мp.в.
Реактивный момент несущего винта, пропорциональный потребной мощности двигателя, достигает наибольшей величины при вертикальном наборе высоты (или висении) и при полете на максимальной скорости, момент от тяги рулевого винта — на режимах, когда поступательная скорость равна нулю.
С переходом к горизонтальному полету и росту скорости потребная мощность уменьшается примерно до Vпр=100 км/ч, а с дальнейшим увеличением скорости начинает возрастать.
Примерно так же с ростом скорости изменяются реактивный момент несущего винта и потребное отклонение правой педали для путевой балансировки вертолета.
При наборе высоты потребные отклонения правой педали больше, чем в горизонтальном полете на той же скорости, из-за большей потребной мощности.
При планировании на режиме самовращения несущего винта его реактивный момент равен нулю; при этом на вертолет действует момент, противоположный реактивному. Этот разворачивающий момент от несущего винта создается силами трения в редукторе и трансмиссии.
Для обеспечения путевой балансировки вертолета на режиме самовращения несущего винта требуется отклонение левой педали. Величина отклонения левой педали в эксплуатационном диапазоне скоростей планирования на режиме самовращения несущего винта практически не изменяется (рис.41).
На крейсерском режиме полета (Vnp = 180 км/ч) для путевой балансировки вертолета необходимо несколько отклонять левую педаль.
Изменение центровки практически не влияет на путевую балансировку вертолета.
Запасы путевого управления при стандартных атмосферных условиях на уровне моря на всех режимах полета достаточны. Минимальный запас путевого управления в сторону упора правой педали имеет место на висении при ветре слева и составляет 1/4 полного диапазона хода педали.
Минимальный запас путевого управления в сторону упора левой педали имеет место при выполнении левого разворота на режиме самовращения несущего винта и составляет 1/4 полного диапазона хода педали.
Вертолет Ми-2 обладает путевой устойчивостью по углу скольжения (углу крена при координированных скольжениях). Путевая устойчивость с увеличением скорости полета уменьшается, с увеличением режима работы двигателей увеличивается. Это видно из рис. 42 по изменению наклона балансировочных кривых.
Больший угол наклона соответствует большей величине путевой устойчивости вертолета.
Устойчивость и управляемость вертолета в полете с грузом на внешней подвеске
Устойчивость и управляемость вертолета с грузом на внешней подвеске во многом определяется поведением груза в полете.
Груз на внешней подвеске под действием набегающего потока воздуха может вращаться относительно вертикальной оси и раскачиваться в плоскости, перпендикулярной набегающему потоку, а при разгоне вертолета —отклоняться назад.
Колебания груза передаются на вертолет и вызывают раскачку вертолета с изменением углов крена и тангажа. Пилотирование вертолета при неустойчивом поведении груза усложняется.
Повышенное влияние колебаний груза на снижение устойчивости вертолета Ми-2 связано с конструкцией системы внешней подвески, в которой плечо между центром тяжести вертолета и центром качания груза (замком подвески) относительно больше разнесено, чем на вертолетах Ми-6 и Ми-8.
Скорость полета, на которой начинает наблюдаться раскачка груза в каждом конкретном случае, определяется аэродинамической формой, размерами и массой транспортируемого груза.
С увеличением скорости полета интенсивность колебаний груза возрастает, в результате чего устойчивость и управляемость вертолета ухудшаются. Выдерживание режима полета при неустойчивом поведении груза требует непрерывного вмешательства летчика в управление вертолетом.
В связи с тем что устойчивость и управляемость вертолета при перевозке большинства видов груза начинают ухудшаться на скоростях, превышающих 150 км/ч, максимальная скорость полета с грузом на внешней подвеске установлена 150 км/ч по прибору.
При перевозке грузов, которые подвержены интенсивной раскачке потоком воздуха, максимальную скорость вертолета необходимо уменьшать ниже 150 км/ч по прибору. Для неустойчивых грузов скорость полета в каждом случае должна подбираться такой, при которой обеспечивается устойчивое поведение груза.
В условиях повышенной турбулентности воздуха (при полетах в торах) максимальная скорость вертолета с грузом на внешней подвеске дополнительно снижена до 110 км/ч по прибору из-за ухудшения устойчивости груза при полете в неспокойном воздухе.
Для уменьшения отклонений груза в продольном направлении и предотвращения его раскачка в поперечном направлении разгоны и торможения вертолета с грузом на внешней подвеске необходимо производить более плавно, чем в обычном полете.
В этих же целях при выполнении разворотов необходимо ввод вертолета в разворот и вывод из него производить плавно, а сам разворот выполнять без превышения скорости, установленной в полете на прямой.
Взлет, висение и посадку с грузом на внешней подвеске рекомендуется производить против ветра, так как избыток мощности двигателей на случай вынужденного отхода от земли уменьшается из-за увеличения потребной мощности вертолета при полете с грузом на внешней подвеске.
Динамическая устойчивость вертолета
Динамическая устойчивость вертолета Ми-2, как и всех существующих вертолетов, хуже, чем самолетов.
Одной из важных особенностей управляемости и динамической устойчивости вертолета является запаздывание в управлении, т. е. запаздывание реагирования на отклонение рычага управления, что может привести к «разбалтыванию» вертолета при парировании моментов, возмущающих движение вертолета.
Вертолет Ми-2 не имеет автоматической системы стабилизации возмущенного движения, поэтому летчик должен каждый раз вмешиваться в управление для парирования возмущенного движения вертолета. Чтобы не допустить «разбалтывания» вертолета, летчик должен делать двойные упреждающие движения ручкой управления.
Динамическая устойчивость вертолета оценивается обычно при выполнении полета с освобожденным управлением (при балансировке его на исходном режиме) и при действии на вертолет внешних возмущений.
Движение вертолета после освобождения управления имеет характер расходящихся колебаний.
Для вертолета Ми-2 среднее время изменения угла крена на 10° в полете с освобожденным управлением составляет 15 с. Движение вертолета в результате возмущения имеет колебательный характер по скорости, углу крена и тангажу с переменной по времени амплитудой этих параметров. Кроме того, наблюдается медленный апериодический уход вертолета с режима в спираль.